

Beiträge von Zahra
-
-
Hallo,
es ist zwar noch keine Mail raus, aber ich meine die Noten sind jetzt in TuCan

-
Hallo,
Bei der 1. Aufgabe war noch der Vektor r_PO gefragt - und vielleicht hinzuzufügen dass die Teilaufgabe f) durch Anschauung lösen zu war

-

Hey kann mir vielleicht jemand sagen wo morgen die klausur geschrieben wird? bin nicht für die aktuelle klausur in moodle angemeldet und weiß nur dass es von 13-17uhr ist.
Hey, in L402/1+2 von 13.30 bis 16 Uhr.
-
Hey,
das steht in moodle dazu:
ZitatEs ist nicht gestattet, Ergänzungen/Veränderungen in irgendeiner Form an der Formelsammlung vorzunehmen. Gestattet sind lediglich farbliche Markierungen (Untersteichen, Textmarker) bzw. Lesezeichen. Die ausgedruckte Fomelsammlung muss geheftet sein.
-
Hallo zusammen,
wie geht ihr beim Lösen des LGS für die Eigenvektoren vor? Ich hab das Gefühl ich brauch unnormal lang, und viele Rechenschritte, insbesondere bei dem vorgesehenen Platz für die Rechnung (zB. ist bei SS2016 eine Seite vorgesehen für 4 LGS) .. Irgendwelche Tipps, Tricks um da schneller voranzukommen?
-

Ich habe ein Frage zu SoSe 17 Aufgabe 3c. Bei der Matrix am Ende fehlt JR2T*Thetam2*JR2. (also Trägheitsmoment der Punktmasse m2 * l2. Oder wieso wird das hier ignoriert?
Das kann ignoriert werden, da eine Punktmasse keine Trägheitsmomente besitzt, der Tensor wäre also 0.
-

Hallo,
bei der SoSe 17 A2 c) sollen wir die Bindungsgleichungen für alle Gelenke aufstellen. Für das Schubgelenk E hätte ich phi3 = 0 auch als eine Bindungsgleichung aufgeschrieben. Warum wird das nicht in der Lösung angegeben?
E ist ein Drehschubgelenk, sodass nur eine Bindungsgleichung aufgestellt werden kann - bzgl der Schubachse. Dass das phi_3 hier 0 bleibt, ergibt sich (nur zufällig) aus der Anordnung der übrigen Gelenke/Körper.
Anders beim Schubgelenk C in WS16/17 (s. Screenshot). Da ist das Schubgelenk fest und der Winkel relevant für eine der zwei Bindungsgleichungen.
-

Kann jemand mal eine Rechnung abfotografieren wie Konstante sich dann wegkürzt? Ich seh es irgendwie nicht...
So sieht die ausgeschriebene MuLö aus:
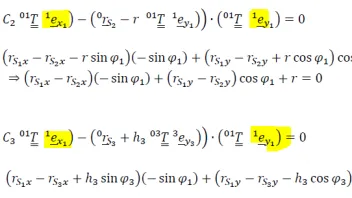
Da die Konstante für beide Kontakte nur in x1-Richtung relevant ist, und der gesamte Term am Ende mit der y1-Achse multipliziert wird (wird wie ein Schubgelenk behandelt), sieht man direkt dass die Konstante wegfällt. Die Achsen sind ja orthogonal und das Skalarprodukt damit 0.
Wenn man es ausschreibt, kommt da sowas wie C*(cos*sin - cos*sin) raus - was ja auch 0 ist.
-
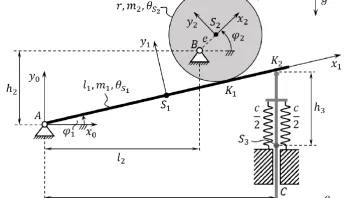
Für die Gelenke A,B und C konnte ich die Bindungsgleichungen aufstellen, für die Kontakte K1 und K2 blicke ich nicht so durch. Ich will ja im Grunde genommen sagen, dass die Scheibe bei K1 nicht abheben darf. Deshalb nehmen wir ja die Gleichung mal ey1. Warum muss ich hier Konstanten angeben?
Für die gesamte Bindungsgleichung, also noch nicht ausmultipliziert, müssen die Konstanten angegeben werden. In x1-Richtung vom Schwerpunkt S1 zum Kontakt (K1 und auch K2) noch ein bestimmter Abstand ist, der durch diese Konstante angegeben wird. Sind im Prinzip irrelevant, da sich diese wegkürzen - aber ich denke, initial muss man diese erwähnen.
-

WS16/17 Aufgabe 2c)
Weiß jemand wie man auf auf die Kontaktbedingung für den Kontakt K2 kommt? Beziehungsweise nach welchem Schema werden die Kontaktbedingungen von K1 und K2 formuliert? K1 erscheint mir ja noch recht logisch aber K2 hätte ich komplett anders formuliert
Woher hast du denn diese Lösung? In meiner Version steht nämlich Folgendes:

-

Bei der vorletzten Gleichung die Klammer auflösen. Dann hast du (beta_2)^2.
Danach einfach nach (beta_2)^2 umformen und Wurzel ziehen.
ok, ich bin blind.. danke!
-
SS 16 Aufgabe 1 e)
Kann mir bitte jemand erklären, wie man auf die Wurzel von beta_2 kommt? Setzt man t* ein, und löst nach beta_2 auf, seh ich keinen Schritt zum quadrieren/Wurzel ziehen...

-
Ich habe den Ortsvektor ins 0 System transformiert und die Jacobi-Matrix ausgerechnet indem ich den Ortsvektor im 0 System abgeleitet habe. Anschließend habe ich die Jacobi-Matrix ins 1 System transformiert und es kam das gleiche Ergebnis raus.
Oh das wundert mich.. hieß es in einer Übung nicht, dass Jakobimatrizen nicht transformierbar sind, da sie keine Tensoren 2. Stufe sind?
-
Hi,

bei der WS 15/16 haben die um die Jacobi-Matrix T1 auszurechnen, nicht den üblichen Ansatz genommen (Ortsvektor 1rs1 nach q ableiten). Meine Jacobi-Matrix hat nur 0 Einträge. Warum funktioniert dieser Ansatz hier nicht?
Gruß
Um die Jakobimatrix aus der Ableitung des Ortsvektors ausklammern zu können, wird immer die absolute Geschwindigkeit gebraucht - da die J-Matrix in der Aufgabe im 1er-System angegeben werden soll, muss die Formel für die relative Zeitableitung angewendet werden, also inkl. w_1.
-
Das würde mich auch interessieren. Die Aufgabe war schon nicht ohne...
Soweit ich weiß ist das Kapitel nicht relevant.
-

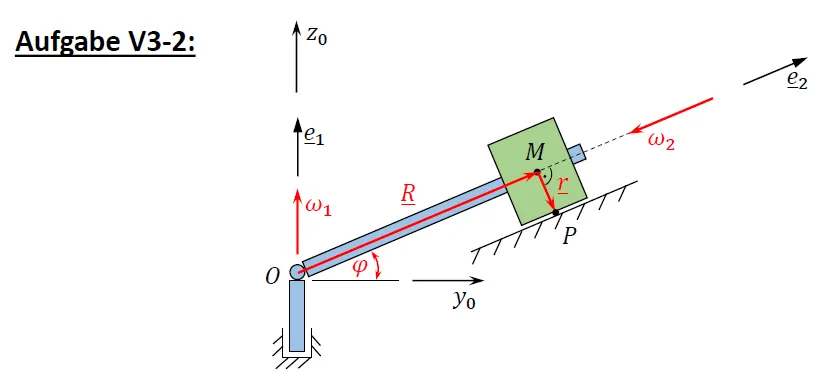
Die Eulerwinkel sind ja eine körperfeste Drehung um die Achsen z,x,z, somit ergibt sich die erste Rotation um z_0 mit w_1*t, die zweite um x_1 mit phi und wieder um z mit -w_2*t.
Also, in meiner Vorstellung ist die dritte Drehung mit w2 nicht um die körperfeste z-Achse.. wäre das nicht eher die y-Achse?
-
VRUE 3-2 b)
Hallo, kann mir bitte jemand erklären, wie hier so schnell die Eulerwinkel berechnet wurden? Gibts einen Trick oder wurden alle T-Matrizen gebildet, multipliziert und daraus die Winkel berechnet?


-
Klausur WS 15/16, Aufgabe 3:
Ich verstehe irgendwie nicht, wie die auf den Lösungsweg bei 3a) und 3b) kommen für J_T1 (J_R1 habe ich..), geschweige denn in b) mit J_T2/J_R2...könnte mir da jemand helfen wie die da auf die Formeln kommen? Stehe auf dem Schlauch...
Bei beiden Jakobimatrizen (bei b. ist ja nur nach der Translation gefragt) wird der Ortsvektor des Schwerpunktes des jeweiligen Körpers gebildet, zerlegt in dem System in dem auch die Jakobimatrix bestimmt werden soll. Bei a) also 1 und bei b) im 2er-System.
Abgeleitet werden muss dieser Ortsvektor aber nach dem 0er-System, um die absolute Geschwindigkeiten zu errechnen. Die Formeln, die dafür angegeben sind in der MuLö, sind die relativen Zeitableitungen, d.h. die jeweilige Winkelgeschwindigkeit des Systems (im Kreuzprodukt mit dem Ortsvektor) muss zur relativen Geschwindigkeit addiert werden..
Hilft das schon weiter, oder noch unklar?
-
Ok hab meinen Fehler gefunden... In der Lösung wird ja das Kreuzprodukt zur Berechnung von T_31 gebildet.
Vorsicht, das Skalarprodukt wird genutzt
Zitat von Alex365Wenn man versucht T_31 über die Normierte Länge des Vektors zu berechnen bekommt man zwar auch ein Ergebnis [ 1/sqrt(2) ], aber das wird vermutlich mit den restlichen Vektoren kein Rechtssystem mehr bilden
Genau, man kriegt ± 1/sqrt(2) - deswegen das Vorzeichen mit dem Skalarprodukt bestimmen.
