

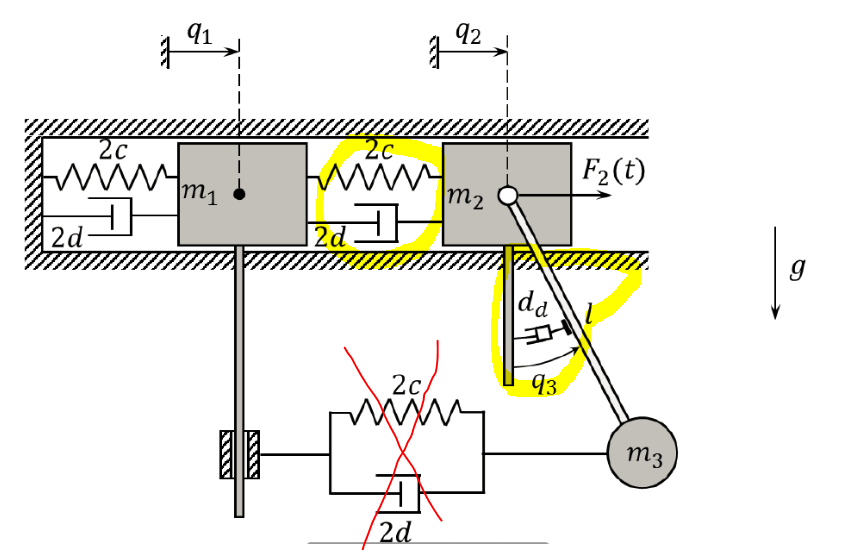
Hallo, weiß jemand warum der Eintrag in obersten Reihe, mittlere Spalte der Dämpfungsmatrix -2d ist und nicht -4d? q2_dot müsste doch eigentlich 2 mal zählen, da für den unteren Dämpfer die geschwindigkeit doch q2_dot + q3_dot ist oder habe ich da nen Denkfehler?

WS 15/16 4d. Dämpfungsmatrix
-
nicolasj92 -
14. Juli 2017 um 11:49 -
Geschlossen
-
-
Der Eintrag [tex]D(1,2)=-2\cdot d[/tex] beinhaltet die Kopplung deiner beiden Massen [tex]m_1[/tex] und [tex]m_2[/tex]. Die Beziehung zwischen [tex]m_1[/tex] und [tex]m_3[/tex] erfolgt über den Eintrag [tex]D(3,1)=D(1,3)[/tex]
Und davon abgesehen ist [tex]q_3[/tex] ein Winkel und die Auslenkung für den Dämpfer zwischen [tex]m_1[/tex] und [tex]m_3[/tex] hängt daher von [tex]l\cdot sin(q_3) \approx l\cdot q_3 [/tex] ab (Kleinwinkelnäherung). -
Ja aber der Dämpfer zwischen m1 und m3 ist ja abhängig von der Relativgeschwindigkeit der beiden Massen. Und m3 bewegt sich ja in horizontaler Richtung mit cos(q3)*l*q3_dot + q2_dot bzw. linearisiert l*q3_dot + q2_dot oder nicht?
-
Die Beziehung zwischen [tex]q_3[/tex] und [tex]q_2[/tex] stellst du über die kinematischen Randbedingungen dar.
-
Servus,
Ich stehe heute ein bisschen auf dem Schlauch aber woher kommt bei D(3,3) 2dl^2 das ^2 her???
-
An der Stelle musst du ja das Moment um [tex]q_3[/tex] aufstellen, wenn [tex]\dot{q_3} \neq 0[/tex] ist. Die Kraft an [tex]m_3[/tex] ist ja durch den Hebel [tex]2dl[/tex]. Um jetzt das Moment um [tex]q_3[/tex] zu bekommen (das ja am Ende in der Matrix steht) musst du also noch ein weiteres mal mit [tex]l[/tex] multiplizieren.
Bei den anderen Einträgen (in [tex]q_1[/tex] und [tex]q_2[/tex]) wirken die Kräfte nicht als Moment, deswegen kommt hier keine Hebelwirkung vor.
Ich merke mir das so:
[Blockierte Grafik: https://abload.de/img/dgdbht.jpg]
Die Wirkungen in [tex]q_3[/tex] sind also in diesem Fall Momente.
-
Hey,
habe leider noch nicht ganz verstanden, warum in der Eintrag D(3,2) leer ist. Müsste da nicht noch ein Anteil für q2_dot stehen ?
-
Mit Hilfe der Matrix-Vorlage wäre an dieser Stelle ja: Wirkung in [tex]q_3[/tex] wenn in [tex]q_2[/tex] bewegt wird und nur die Dämpfer um [tex]q_2[/tex] aktiv sind.
Den untersten Dämpfer kannst du also vernachlässigen und somit gibt es kein Moment um [tex]q_3[/tex]. -
Hmm ok, das Moment durch den unteren Dämpfer ium q3 wäre doch
-(q1_dot - q2_dot - q3_dot*l) * 2dl ?
Warum wird q2_dot nicht betrachtet?
-
Weil du die Dämpfer vernachlässigst, die nicht direkt an deiner bewegten Masse angreifen.
[Blockierte Grafik: https://abload.de/img/20dank.png]
-
OK, also wird die Koordinate q2 einfach vernachlässigt... Danke
{kind=link}
{kind=link}